Utilizamos cookies para mejorar tu experiencia. Para cumplir con la nueva directiva sobre privacidad electrónica, necesitamos el consentimiento para utilizar tus cookies. Aprende más.

Kilobot Robot
Kilobot es un sistema robótico de bajo costo y fácil de usar para avanzar en el desarrollo de "enjambres" de robots que se pueden programar para realizar funciones útiles mediante la coordinación de interacciones entre muchas personas.
1.199,00 €
Disponibilidad:
Disponible
SKU
2318
Kilobot es un sistema robótico de bajo costo y fácil de usar para avanzar en el desarrollo de "enjambres" de robots que se pueden programar para realizar funciones útiles mediante la coordinación de interacciones entre muchas personas. Estos enjambres están inspirados en insectos sociales, como colonias de hormigas, que pueden buscar y encontrar eficientemente fuentes de alimento en grandes ambientes complejos, transportar colectivamente grandes objetos y coordinar la construcción de nidos y puentes en tales ambientes.
Siguiendo esta inspiración de la naturaleza, los enjambres de robots podrían algún día hacer un túnel a través de los escombros para encontrar sobrevivientes, monitorear el medio ambiente y eliminar contaminantes, ayudar a la disminución de las poblaciones de abejas en la polinización de los cultivos, y autoensamblarse para formar estructuras de apoyo en edificios colapsados. El Kilobot está diseñado para proporcionar a los científicos un banco de pruebas físico para avanzar en la comprensión del comportamiento colectivo y realizar su potencial para ofrecer soluciones para una amplia gama de desafíos.
- Bajo costo
- Pequeño, sólo 33 mm de diámetro
- Control fino del motor (255 niveles de potencia diferentes)
- El Kilobot puede comunicarse con vecinos de hasta 7 cm.
- Detección de distancia de vecino a vecino
- Detección de luz ambiental
- RGB led
- Batería recargable y amovible
- Fácil de manipular, con el controlador Kilobot puedes programar y controlar cientos de Kilobot a la vez.
El paquete incluye
- Diez Kilobots incluyendo una batería por robot
| Elementos | INFORMACIONES TÉCNICAS |
|---|---|
| Procesador | ATmega 328P (8bit a 8MHz) |
| Memoria | 32 KB Flash utilizado tanto para el programa de usuario como para el gestor de arranque, 1KB EEPROM para almacenar valores de calibración y otros datos no volátiles y SRAM de 2 KB |
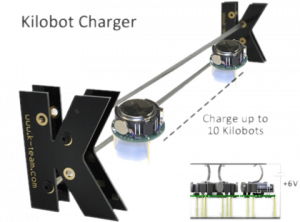
| Batería | Li-Ion recargable 3.7V, para una autonomía de 3 meses en modo de suspensión. Alrededor de 2,5 horas en uso estándar con motores. Cada Kilobot tiene un cargador incorporado, que carga la batería a bordo cuando se aplica +6 voltios a cualquiera de las patas, y GND se aplica a la pestaña de carga. |
| Carga | Cargador Kilobot (opcional). El tiempo de carga es de aproximadamente 3 horas |
| Comunicación | Los kilobots pueden comunicarse con vecinos de hasta 7 cm de distancia reflejando la luz infrarroja (IR) fuera de la superficie del suelo. |
| Detección | Al recibir un mensaje, la distancia al Kilobot transmisor se puede determinar utilizando la intensidad de la señal recibida. Se puede detectar el brillo de la luz ambiental que brilla en un Kilobot. |
| Movimiento | Cada Kilobot tiene 2 motores de vibración, que son controlables de forma independiente, lo que permite el accionamiento diferencial del robot. Cada motor se puede ajustar a 255 niveles de potencia diferentes. |
| Luz | Cada Kilobot tiene un LED rojo/verde/azul (RGB) apuntando hacia arriba, y cada color tiene 3 niveles de control de brillo. |
| Dimensiones | El diámetro es de 33 mm y la altura es de 34 mm (incluidas las patas) |
| Software | La interfaz KiloGUI está disponible para controlar la placa controladora, enviar archivos de programa a los robots y controlarlos. |
| Programación | Para la programación, el software de desarrollo de código abierto WinAVR combinado con Eclipse proporciona un entorno de programación C. Una API con funciones básicas como velocidad del motor, control led, medición de distancia,... está disponible y se proporcionan algunos ejemplos. |
| Depuración | Un encabezado de salida serie está disponible en cada robot para la depuración a través del terminal del ordenador. |
| Simulador | V-REP, simulador 3D realista y programación de robots (incluido para la educación), con modelo Kilobot. |
| Marca | K-Team |
|---|---|
| Color | Negro |
| Diámetro (cm) | 3,3 |
| Peso | 1.000000 |
Escribir Su propia reseña
¡Hemos encontrado otros productos que te pueden gustar!